TwinCAT Project Running#
This document describes how to run the Servo_motor demo.
Open the project#
If the project does not exist, please follow the TwinCAT Project Setup to setup the project. If the project is closed, open it as steps below:
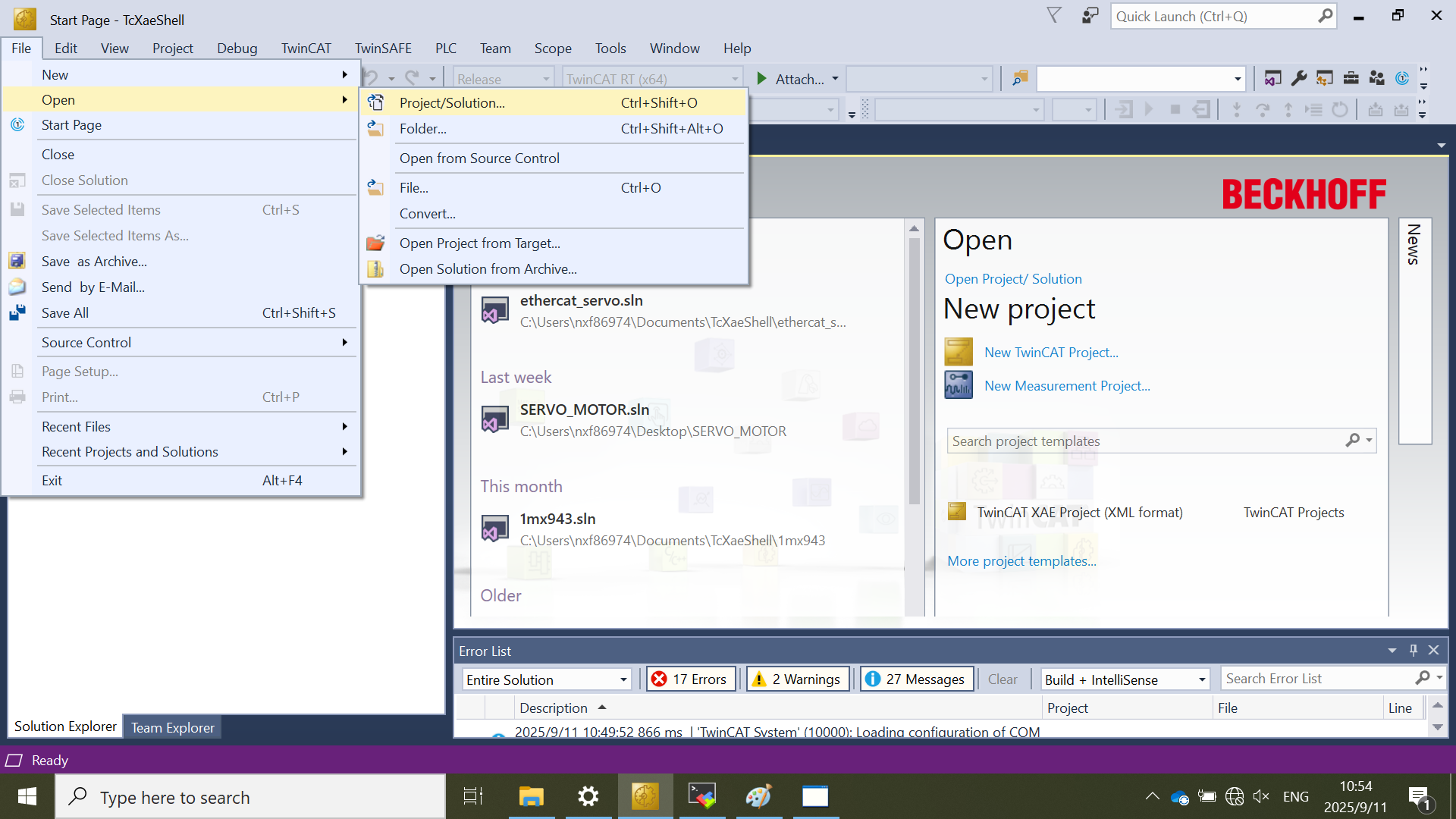
Click File > Open > Project/Solution.
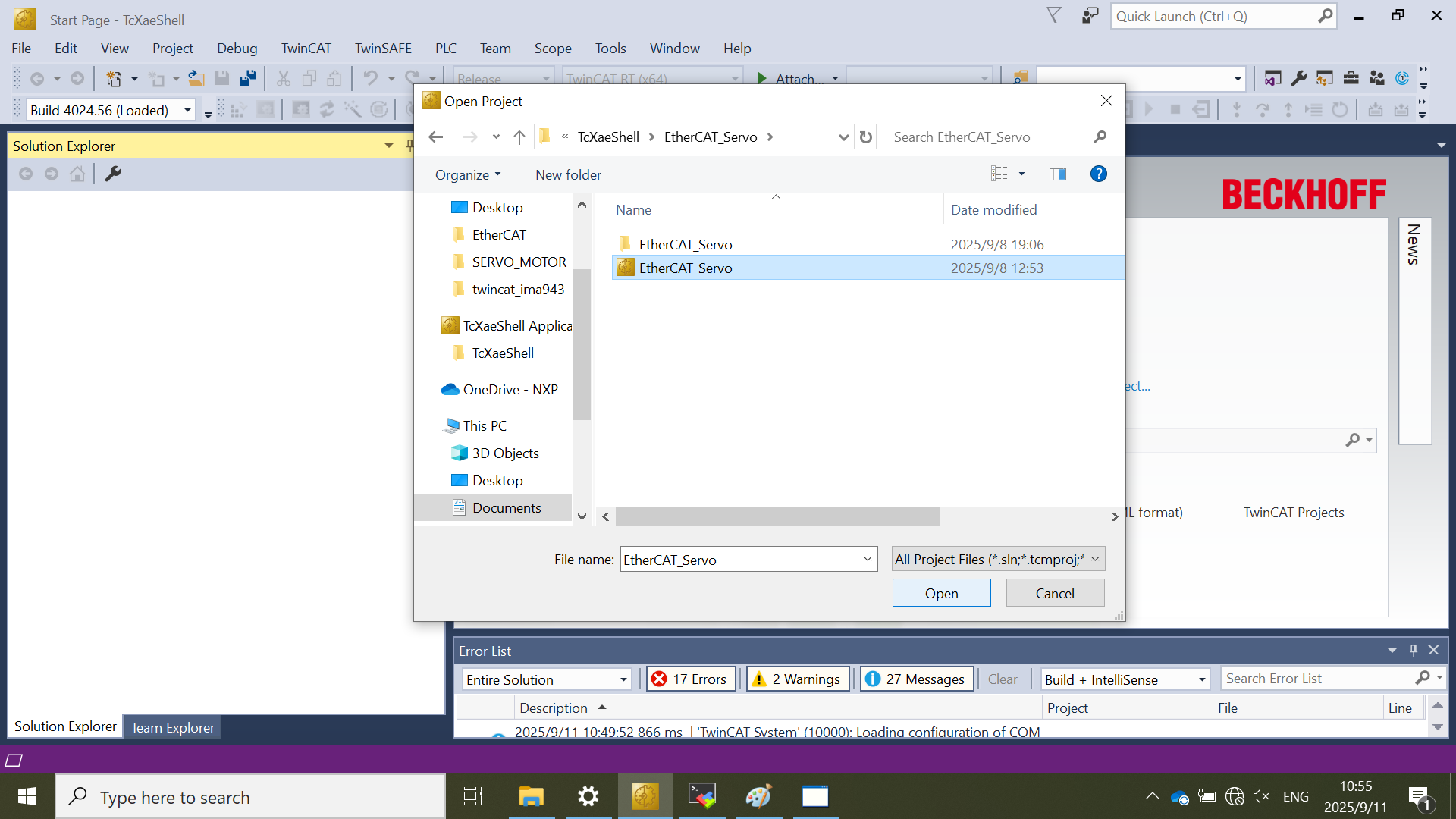
Select the EtherCAT_sevor project.
Activate the Configuration#
Please make sure that the hardware setup is ready to start first.
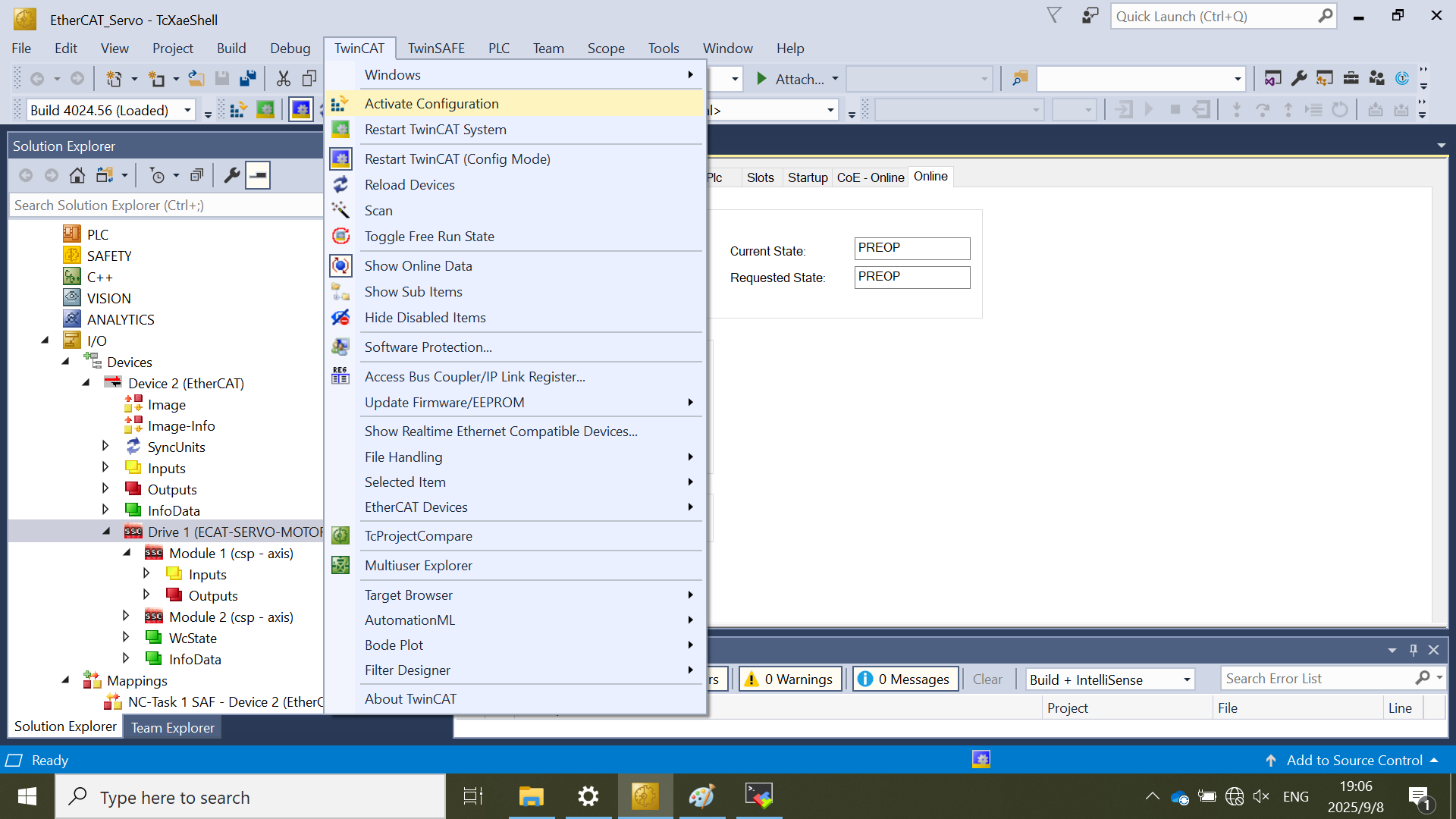
Select Activate Configuration in the TwinCAT tab.
Check the state of EtherCAT state machine#
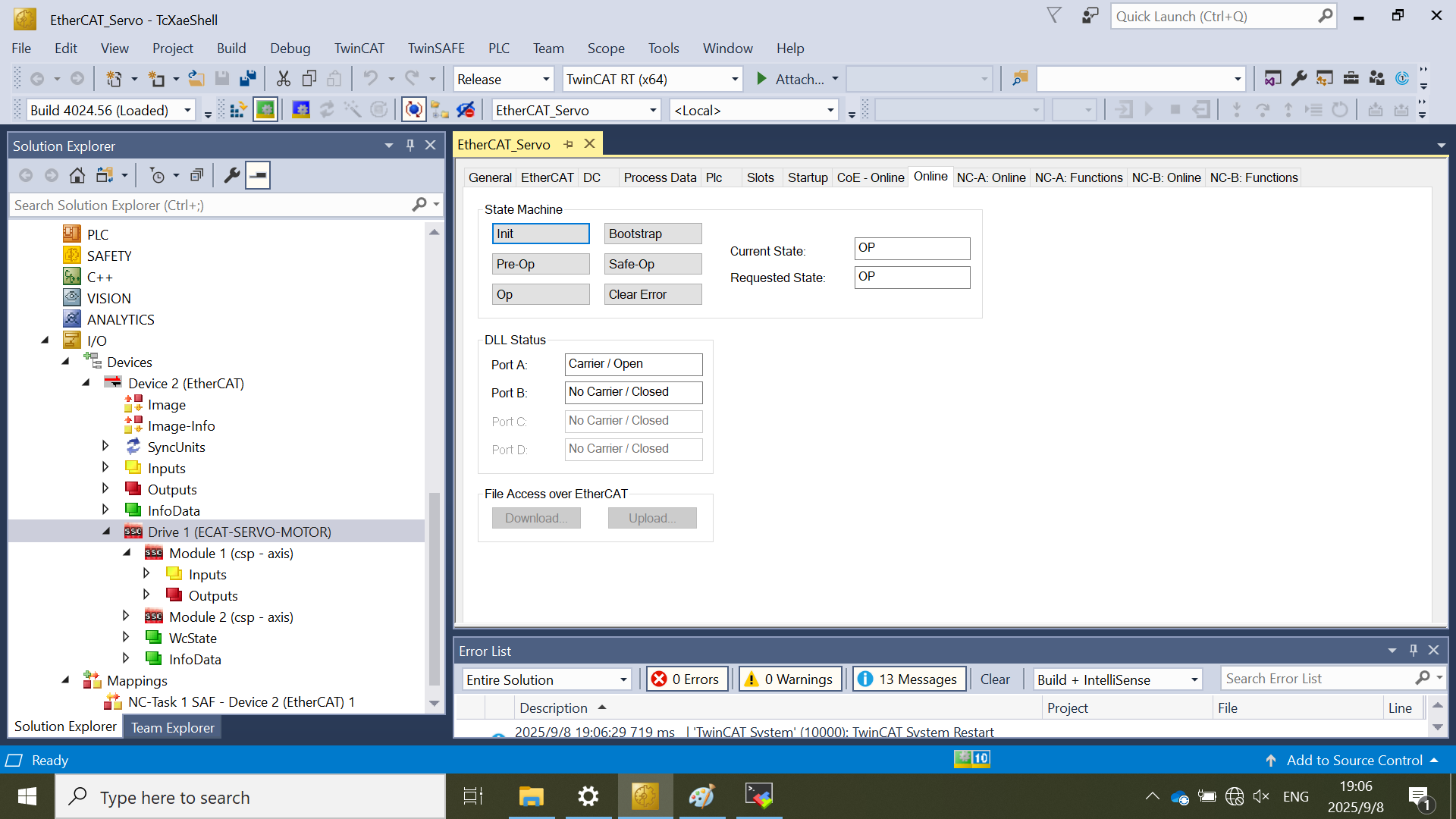
Make sure that the current state of EtherCAT state machine has been switched to OP mode.
Enabling the motors#
Select NC-A: Online for Motor1 and Select NC-B: Online for Motor2 if the Motor2 is connected.
Click Set in the Enabling pane.
Click All to enable Controller, Feed Fw and Feed Bw options.
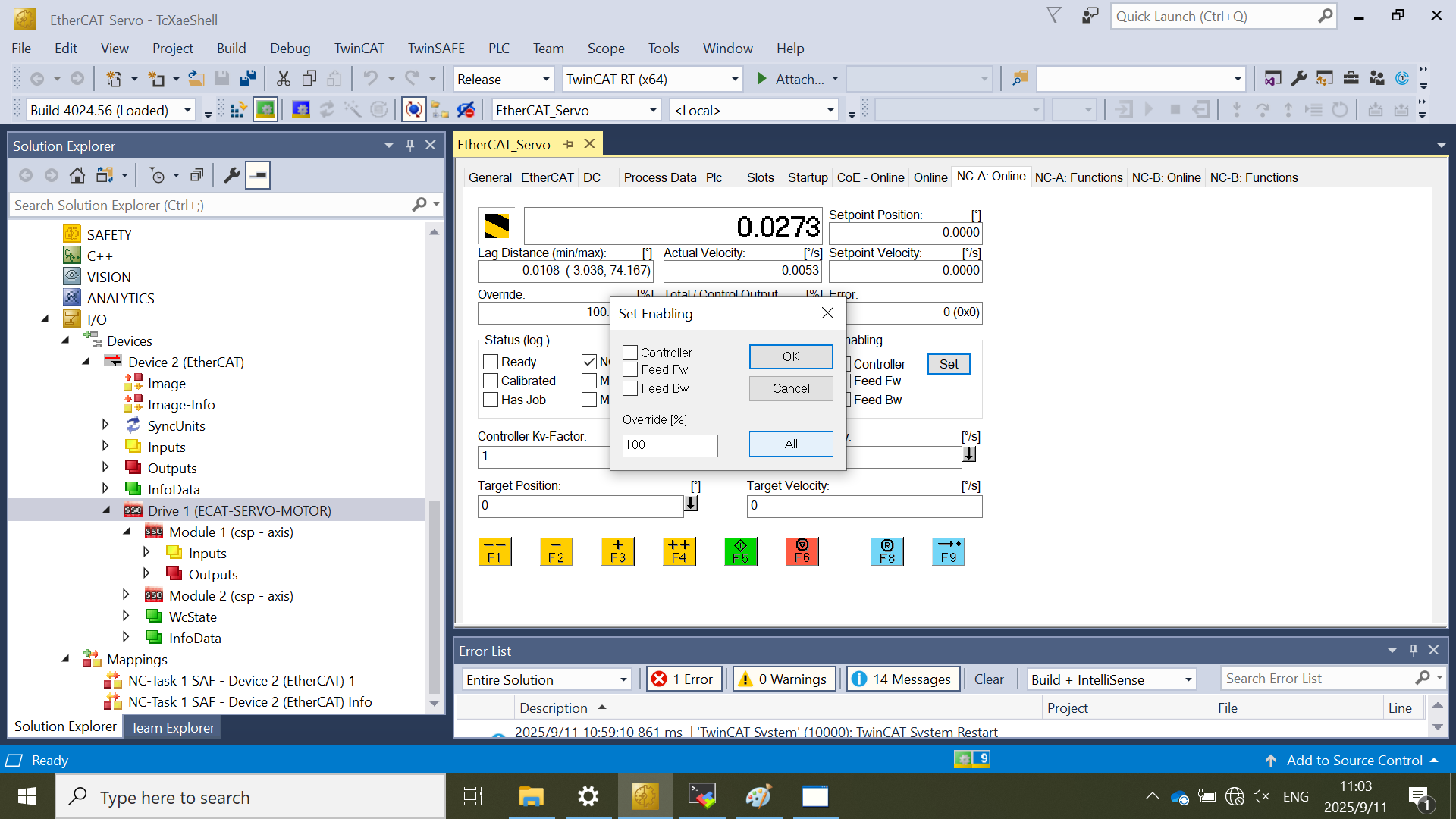
After enabling, the associated motor is locked.
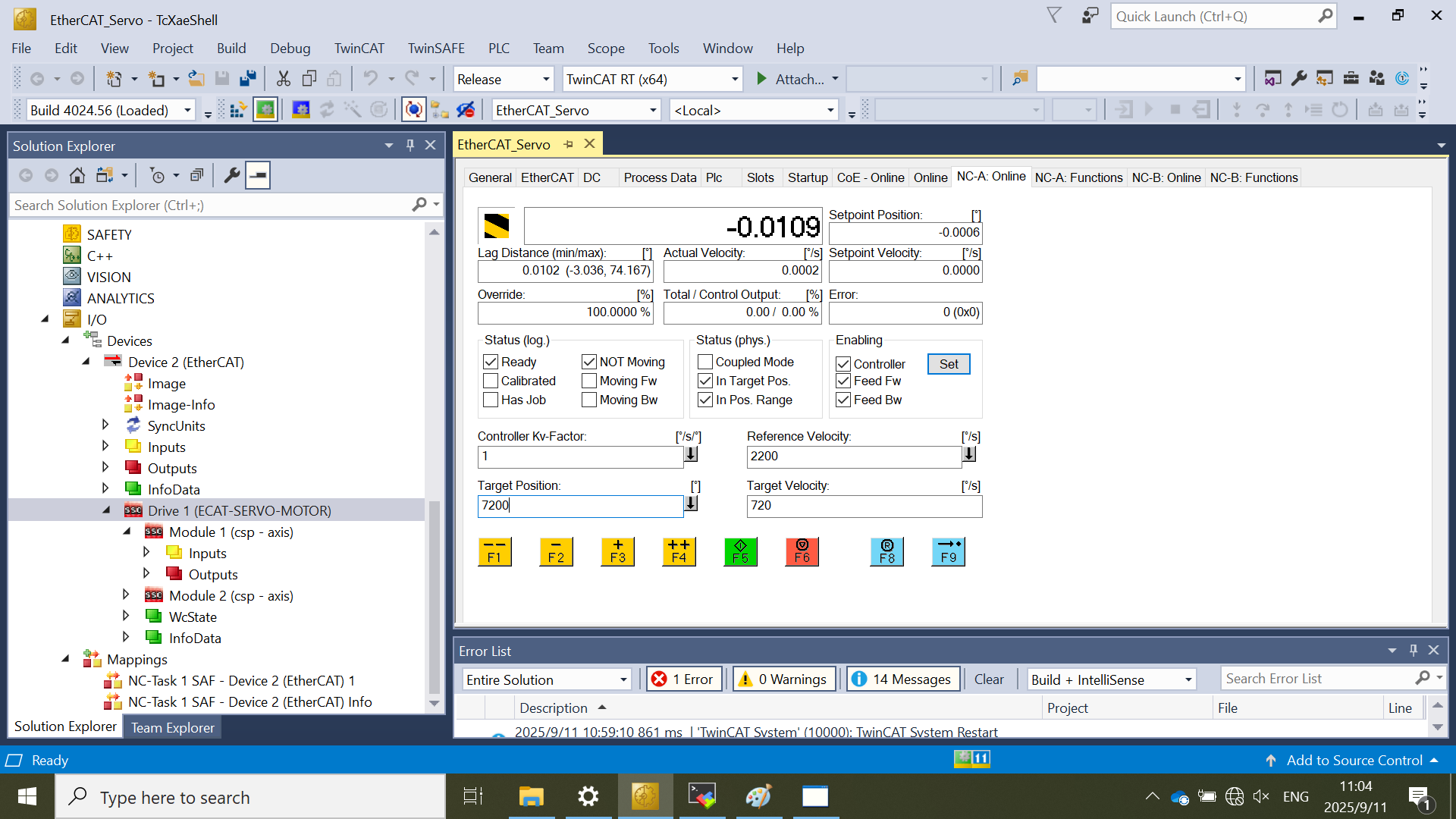
Start the motors#
Select NC-A: Online for Motor1 and Select NC-B: Online for Motor2 if the Motor2 is connected.
Set Target Velocity to 720 degree per second, namely: 2 revolution per second.
Set Target Position to 7200 degree. It means that the motor will move to the tenth revolution from current position.
Click F5 button to start the motor.
Disabling the motors#
Select NC-A: Online for Motor1 and Select NC-B: Online for Motor2 if the Motor2 is connected.
Click Set in the Enabling pane.
Cancel the Controller, Feed Fw and Feed Bw options, and click OK.
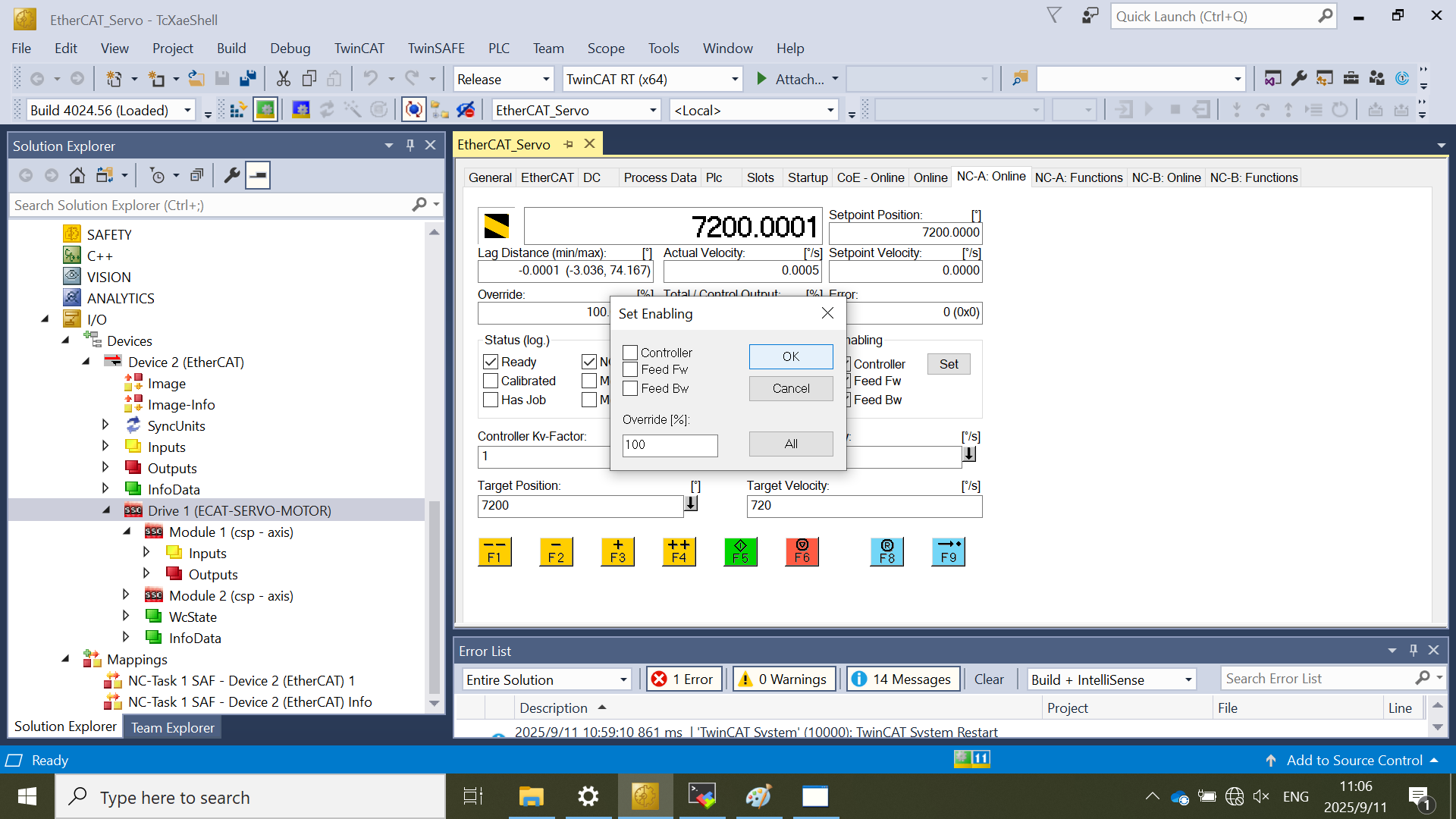
After disabling, the associated motor is unlocked.