eIQ MPP Hardware Abstraction Layer API#
MPP-HAL VERSION 4.2
Chapter 1#
This is the documentation for the Hardware Abstraction Layer(HAL) API.
1.1 HAL overview#
The hardware abstraction layer is used to abstract hardware and software components. With the usage of an HAL abstraction, the vision pipeline will be leveraging hardware accelerated components whenever possible.
1.1.1 MPP hal description#
The HAL is presented with respect of the following points:
A common header file “hal.h” includes all hardware top level functions.
All hardware top level functions are using the prefix: “hal_ “.
For each platform all hal_ functions defined in hal.h should be implemented at least with an empty function.
Here is an overview:
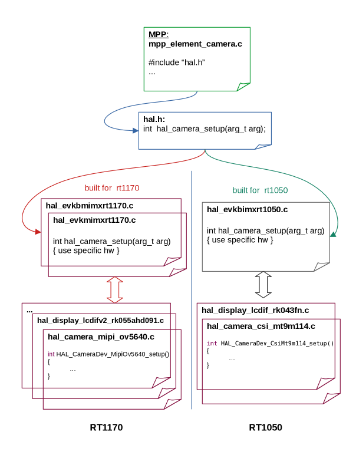
Figure 1.1 HAL overview
1.1.2 MPP HAL components#
Source elements HAL
Camera
Static image
File source
processing elements HAL
Graphics driver
Vision algorithms
Labeled rectangle
Sink elements HAL
Display
1.1.3 Supported devices#
At present, the MPP HAL supports the following devices:
Cameras:
OV5640
MT9M114
OV7670
Logitech C920 PRO HD WEBCAM
Displays:
LVGL
RK055AHD091
RK055MHD091
RK043FN02H-CT
Mikroe TFT Proto 5(SSD1963 controller)
NXP’s LCD-PAR-S035 (ST7796S controller)
FBdev
Graphics:
PXP
CPU
GPU
JPEG Decoder:
JPEG SW
JPEG HW
1.1.4 Supported boards#
Currently, the MPP HAL supports the following boards:
(deprecated) evkmimxrt1170 is supported with the following devices:
Cameras: OV5640.
Displays: RK055AHD091 and RK055MHD091.
(deprecated) evkbimxrt1050 is supported with the following devices:
Cameras: MT9M114.
Displays: RK043FN02H-CT.
evkbmimxrt1170 is supported by porting the following devices:
Cameras: OV5640.
Displays: LVGL, RK055AHD091 and RK055MHD091.
frdmmcxn947 is supported by porting the following devices:
Cameras: OV7670.
Displays: Mikroe TFT Proto 5” and NXP’s LCD-PAR-S035.
mimxrt700evk is supported by porting the following devices:
Cameras: OV7670, Logitech C920 PRO HD WEBCAM
Displays: RK055AHD091 and RK055MHD091.
How to port new boards/devices: The MPP Hal provides the flexibility to the user to port new boards and devices(cameras and displays).
Supporting new boards: To support a new board a new file hal_{board_name} should be added under the ‘hal’ directory.
Supporting new devices: The hal components that can support new devices are:
Cameras
Display
Graphics processing
A new device can simply be supported by:
Providing the approriate hal_{device_module} implementation.
Adding his name and setup entry point to the appropriate device list in the associated board hal_{board_name} file.
Enabling/Disabling Hal components and devices:
The HAL components can be enabled/disabled from “mpp_config.h” using the compilation flags(HAL_ENABLE_{component_name}).
The HAL devices can also be enabled/disabled from “mpp_config.h” using the compilation flags(HAL_ENABLE_{device_name}).
Chapter 2#
2.1 HAL Types#
Data Structures
struct camera_dev_static_config_t
struct camera_dev_t
struct virtual_usb_cam_config_msg_t
struct virtual_usb_cam_req_msg_t
struct virtual_usb_cam_rsp_msg_t
struct virtual_usb_cam_msg_t
struct static_image_static_config_t
struct static_image_t
struct filesrc_config_t
struct filesrc_t
struct gfx_surface_t
struct gfx_rotate_config_t
struct gfx_dev_t
struct hal_rect_t
struct vdec_dev_t
struct vdec_h264_frame_info_t
struct vdec_h264_dev_t
struct model_param_t
struct vision_frame_t
struct vision_algo_dev_t
struct display_dev_t
struct hw_buf_desc_t
struct hal_img_decoder_setup_t
struct hal_graphics_setup_t
struct hal_display_setup_t
struct hal_camera_setup_t
struct checksum_data_t
Macros
#define MAX_STREAM_REQUESTERS
#define TARGET_CAMERA0_WIDTH
#define TARGET_CAMERA0_HEIGHT
#define TARGET_CAMERA1_WIDTH
#define TARGET_CAMERA1_HEIGHT
#define TARGET_CAMERA0_RESOLUTION
#define TARGET_CAMERA1_RESOLUTION
#define TARGET_CAMERA_MAX_RESOLUTION
#define TARGET_CAMERA_FPS
#define CAMERA_DEV_BUFFER_ALIGN
#define CORE1_EPT_ADDRESS
#define MPP_EPT_ADDRESSS
#define RTSP_EPT_ADDRESS
#define APP_EP_READY_EVENT_DATA
#define FILE_SOURCE_FILEPATH_MAX_LEN
#define HAL_GFX_DEV_CPU_NAME
#define GUI_PRINTF_BUF_SIZE
#define GUI_PRINTF_BUF_SIZE
#define HAL_VDEC_DEV_NAME
#define MAX_INPUT_PORTS
#define MAX_OUTPUT_PORTS
#define HAL_DEVICE_NAME_MAX_LENGTH
Typedefs
[vision_algo_private_data_t]
Enumerations
}
}
enum virtual_usb_cam_msg_type_e {
VIRT_USB_CAM_NOMSG ,
VIRT_USB_CAM_CONFIG,
VIRT_USB_CAM_CONFIG_ACK, VIRT_USB_CAM_CONFIG_ERR ,
VIRT_USB_CAM_REQRGB ,
VIRT_USB_CAM_REQIR,
VIRT_USB_CAM_REQRGBIR ,
VIRT_USB_CAM_RSPRGB ,
VIRT_USB_CAM_RSPIR ,
VIRT_USB_CAM_RSPRGBIR ,
VIRT_USB_CAM_ERROR }
enum virtual_usb_cam_user_id_e {
RTSP_USER_ID ,
MPP_USER_ID }
enum virtual_usb_cam_col_format_e { VIRT_USB_CAM_JPEG }
enum hal_image_status_t {
}
}
enum gfx_rotate_target_t {
kGFXRotateTarget_None,
kGFXRotate_SRCSurface,
kGFXRotate_DSTSurface
}
enum hal_vdec_status_t {
}
enum hal_valgo_status_t {
}
}
}
enum mpp_memory_policy_t {
}
}
Functions
int search_h264_nalu (const uint8_t ∗data, int32_t len)
int HAL_GfxDev_CPU_Register (gfx_dev_t ∗dev)
int HAL_GfxDev_GPU_Register (gfx_dev_t ∗dev)
void HAL_JPEG_PrintValidationStats (void)
int HAL_JPEG_CPU_Register (vdec_dev_t ∗dev)
int HAL_JPEG_HW_Register (vdec_dev_t ∗dev)
hal_vdec_status_t HAL_VdecDev_H264_CPU_Register (vdec_h264_dev_t ∗dev)
int setup_static_image_elt (static_image_t ∗elt)
int setup_filesrc_elt (filesrc_t ∗elt)
uint32_t calc_checksum (int size_b, void ∗pbuf)
2.1.1 Detailed Description#
This section provides the detailed documentation for the MPP HAL types.
2.1.1.1 Data Structure Documentation#
camera_dev_static_config_t#
struct camera_dev_static_config_t
Structure that characterizes the camera device.
Data Fields
type |
name |
description |
|---|---|---|
int |
height |
buffer height |
int |
width |
buffer width |
int |
pitch |
buffer pitch |
int |
left |
left position |
int |
top |
top position |
int |
right |
right position |
int |
bottom |
bottom position |
mpp_rotate_degree_t |
rotate |
rotate degree |
mpp_flip_mode_t |
flip |
flip |
int |
swapByte |
swap byte per two bytes |
mpp_pixel_format_t |
format |
pixel format |
int |
framerate |
frame rate |
int |
stripe_size |
stripe size in bytes |
bool |
stripe |
stripe mode |
uint32_t |
n_streams |
number of total output video streams |
uint32_t |
min_stream_req_cnt |
minimum number of enqueue calls to wait for |
uint32_t |
crt_stream_req_cnt |
number of streams requested for enqueue |
mpp_exec_flag_t |
req_cnt_type |
flag to control stream request counting |
mpp_camera_stream_cfg |
stream[NUM_STREAMS] |
stream configuration |
bool |
stream_requested[NUM_STREAMS] |
flag to track if a stream is required for enqueue |
void ∗ |
stream_requester[NUM_STREAMS][MAX_STREAM_REQUESTERS] |
array of requestersfor each stream |
bool |
in_advance_enqueue |
flag to indicate advance enqueue mode |
camera_dev_private_capability_t#
struct camera_dev_private_capability_t
Camera device private capability.
Data Fields
type |
name |
description |
|---|---|---|
callback |
callback |
|
void ∗ |
param |
parameter for the callback |
camera_dev#
struct _camera_dev
Camera devices can enqueue and dequeue frames as well as react to events from input devices via the “input← Notify” function. Camera devices can use any number of interfaces, including MIPI and CSI as long as the HAL driver implements the necessary functions found in camera_dev_operator_t. Examples of camera devices include the Orbbec U1S 3D SLM camera module and the OnSemi MT9M114 camera module.
Data Fields
int |
id |
unique id which is assigned by camera manager during registration |
|---|---|---|
char |
[ENGTHname of]] the device |
|
const camera_dev_operator_t ∗ |
ops |
operations |
config |
static configurations |
|
cap |
private capability |
|
void ∗ |
data |
device private data |
virtual_usb_cam_config_msg_t#
struct virtual_usb_cam_config_msg_t
Structure that characterizes the payload of the camera config message sent from core 0 to core 1.
Data Fields
type |
name |
description |
|---|---|---|
uint32_t |
camera_width |
Width of the camera output in pixels. |
uint32_t |
camera_height |
Height of the camera output in pixels. |
color_format |
Color format for the camera output (e.g., JPEG) |
|
uint32_t |
fps |
Frames per second for camera capture rate. |
virtual_usb_cam_req_msg_t#
struct virtual_usb_cam_req_msg_t
Structure that characterizes the payload of the camera request message containing frame buffer addresses for RGB and IR data.
Data Fields
type |
name |
description |
|---|---|---|
uint32_t |
rgb_frame_addr |
Physical address of the RGB frame buffer. |
uint32_t |
rgb_max_frame_size |
Maximum size allocated for RGB frame buffer. |
uint32_t |
ir_frame_addr |
Physical address of the IR frame buffer. |
uint32_t |
ir_max_frame_size |
Maximum size allocated for IR frame buffer. |
virtual_usb_cam_rsp_msg_t#
struct virtual_usb_cam_rsp_msg_t
Structure that characterizes the payload of the camera request message containing frame addresses and sizes for RGB and IR data.
Data Fields
type |
name |
description |
|---|---|---|
uint32_t |
rgb_frame_addr |
Physical address of the RGB frame buffer (looped back by the core 1 camera app) |
uint32_t |
rgb_frame_size |
Size in bytes of the RGB frame data. |
uint32_t |
ir_frame_addr |
Physical address of the IR frame buffer (looped back by the core 1 camera app) |
uint32_t |
ir_frame_size |
Size in bytes of the IR frame data. |
virtual_usb_cam_msg_t#
struct virtual_usb_cam_msg_t
Structure that characterizes the messages sent between cores.
Data Fields
type |
name |
description |
|---|---|---|
msg_type |
Type of message being sent (config, request, response, etc.) |
|
virtual_usb_cam_user_id_e |
user_id |
Identifier for the user/component sending the message (RTSP or MPP) |
union msg_payload_u |
msg_payload |
Union containing the actual message data based on msg_type. |
static_image_static_config_t#
struct static_image_static_config_t
Structure that characterizes the image element.
Data Fields
type |
name |
description |
|---|---|---|
int |
height |
buffer height |
int |
width |
buffer width |
int |
left |
left position |
int |
top |
top position |
int |
right |
right position |
int |
bottom |
bottom position |
mpp_pixel_format_t |
format |
pixel format |
bool |
stripe |
stripe mode |
int |
compressed_size |
compressed size in bytes |
static_image#
struct _static_image
Attributes of an image element.
Data Fields
type |
name |
description |
|---|---|---|
int |
id |
unique id which is assigned by image manager |
const static_image_operator_t ∗ |
ops |
operations |
config |
static configs |
|
int |
stripe_idx |
the current stripe index |
uint8_t ∗ |
buffer |
static image buffer |
filesrc_config_t#
struct filesrc_config_t
Structure that characterize the file source element.
Data Fields
type |
name |
description |
|---|---|---|
char |
filepath[FILE_SOURCE_FILEPATH_MAX_LEN] |
File name to read. |
bool |
loop_enabled |
Flag to enable looping the file. |
int |
file_buffer_size |
File buffer size in bytes. |
slice_search_func_t |
slice_search_func |
Optional slice search function. |
filesrc_t#
struct _filesrc
Attributes of a file source element.
Data Fields
type |
name |
description |
|---|---|---|
const filesrc_operator_t ∗ |
ops |
operations |
config |
file source configs |
|
uint8_t ∗ |
buffer |
Pointer to file read buffer. |
uint32_t |
buffer_size |
File read buffer size. |
gfx_surface_t#
struct gfx_surface_t
Gfx surface parameters.
Data Fields
type |
name |
description |
|---|---|---|
int |
height |
buffer height |
int |
width |
buffer width |
int |
pitch |
buffer pitch |
int |
pitch_uv |
buffer pitch for chroma planes |
int |
left |
left position |
int |
top |
top position |
int |
right |
right position |
int |
bottom |
bottom position |
int |
swapByte |
swap byte per two bytes |
mpp_pixel_format_t |
format |
pixel format |
void ∗ |
buf |
buffer |
void ∗ |
buf_u |
buffer for chroma plane U |
void ∗ |
buf_v |
buffer for chroma plane V |
void ∗ |
lock |
the structure is determined by hal and set to null if not use in hal |
gfx_rotate_config_t#
struct gfx_rotate_config_t
gfx rotate configuration.
Data Fields
type |
name |
description |
|---|---|---|
gfx_rotate_target_t |
target |
|
mpp_rotate_degree_t |
degree |
gfx_dev#
struct _gfx_dev
Data Fields
type |
name |
description |
|---|---|---|
int |
id |
|
const gfx_dev_operator_t |
ops |
|
src |
||
dst |
||
callback |
||
void ∗ |
user_data |
hal_rect_t#
struct hal_rect_t
rectangle positions.
Data Fields
type |
name |
description |
|---|---|---|
int |
top |
|
int |
left |
|
int |
bottom |
|
int |
right |
vdec_h264_frame_info_t#
struct vdec_h264_frame_info_t
H.264 decode frame information structure.
Data Fields
type |
name |
description |
|---|---|---|
uint8_t ∗ |
src_data |
|
int32_t |
src_size |
|
uint8_t ∗ |
dst_y |
|
uint8_t ∗ |
dst_u |
|
uint8_t ∗ |
dst_v |
|
int32_t |
width |
|
int32_t |
height |
|
int32_t |
y_stride |
|
int32_t |
uv_stride |
vdec_dev_t#
struct _vdec_dev
Data Fields
type |
name |
description |
|---|---|---|
int |
id |
|
const vdec_dev_operator_t ∗ |
ops |
|
callback |
||
void ∗ |
user_data |
vdec_h264_dev_t#
struct _vdec_h264_dev
Data Fields
type |
name |
description |
|---|---|---|
int |
id |
|
const vdec_h264_dev_operator_t ∗ |
ops |
|
callback |
||
void ∗ |
user_data |
model_param_t#
struct model_param_t
Structure passed to HAL as description of the binary model provided by user.
Data Fields
const void ∗model_data
int model_size
float model_input_mean
float model_input_std
mpp_inference_params_t inference_params
int height
int width
mpp_pixel_format_t format
mpp_tensor_type_t inputType
mpp_tensor_order_t tensor_order
mpp_t mpp
int(∗evt_callback_f )(mpp_t mpp, mpp_evt_t evt, void ∗evt_data, void ∗user_data)
void ∗cb_userdata
Field Documentation
model_data#
const void∗ model_param_t::model_data pointer to model binary
model_size#
int model_param_t::model_size model binary size
model_input_mean#
float model_param_t::model_input_mean
model ‘mean’ of input values, used for normalization
model_input_std#
float model_param_t::model_input_std
model ‘standard deviation’ of input values, used for normalization
inference_params#
mpp_inference_params_t model_param_t::inference_params inference parameters
height#
int model_param_t::height frame height
width#
int model_param_t::width frame width
format#
mpp_pixel_format_t model_param_t::format pixel format
inputtype#
mpp_tensor_type_t model_param_t::inputType input type
tensor_order#
mpp_tensor_order_t model_param_t::tensor_order tensor order
mpp#
mpp_t model_param_t::mpp mpp handle
evt_callback_f#
int(∗ model_param_t::evt_callback_f) (mpp_t mpp, mpp_evt_t evt, void ∗evt_data, void ∗user_data)
the callback to be called when model output is ready
cb_userdata#
void∗ model_param_t::cb_userdata
pointer to user data, should be passed by callback
valgo_dev_private_capability_t#
struct valgo_dev_private_capability_t
Valgo devices private capability.
Data Fields
type |
name |
description |
|---|---|---|
void ∗ |
param |
param for the callback |
vision_frame_t#
struct vision_frame_t
Characteristics that need to be defined by a vision algo.
Data Fields
type |
name |
description |
|---|---|---|
int |
height |
frame height |
int |
width |
frame width |
int |
pitch |
frame pitch |
mpp_pixel_format_t |
format |
pixel format |
void ∗ |
input_buf |
pixel input buffer |
vision_algo_dev_t#
struct _vision_algo_dev
Attributes of a vision algo device.
Data Fields
type |
name |
description |
|---|---|---|
int |
id |
unique id which is assigned by algorithm manager during the registration |
char |
[ENGTHname to]] identify |
|
cap |
private capability |
|
const vision_algo_dev_operator_t ∗ |
ops |
operations |
vision_algo_private_data_t |
priv_data |
private data |
display_dev_private_capability_t#
struct display_dev_private_capability
Structure that characterizes the display device.
Data Fields
type |
name |
description |
|---|---|---|
int |
height |
buffer height |
int |
width |
buffer width |
int |
pitch |
buffer pitch |
int |
left |
left position |
int |
top |
top position |
int |
right |
right position |
int |
bottom |
bottom position |
int |
stripe_height |
stripe height (0 if stripe mode is off) |
bool |
stripe |
stripe mode |
mpp_rotate_degree_t |
rotate |
rotate degree |
mpp_pixel_format_t |
format |
pixel format |
int |
nbFrameBuffer |
number of input buffers |
void ∗∗ |
frameBuffers |
array of pointers to frame buffer |
callback |
callback |
|
void ∗ |
user_data |
parameter for the callback |
void ∗ |
handle |
Handle to the LVGL widget ‘image’. |
void ∗∗ |
p_in_buf_addr |
Pointer to current input buffer address. |
display_dev_t#
struct display_dev_t
Attributes of a display device. hal display device declaration.
Display devices can be used to display images, GUI overlays, etc. Examples of display devices include display panels like the RK024hh298 display, and external displays like UVC (video over USB).
Data Fields
type |
name |
description |
|---|---|---|
int |
id |
unique id which is assigned by the display manager during the registration |
char |
[ENGTHname of]] the device |
|
const display_dev_operator_t ∗ |
ops |
operations |
display_dev_private_capability_t |
cap |
private capability |
hw_buf_desc_t#
struct hw_buf_desc_t
the hardware specific buffer requirements
Data Fields
type |
name |
description |
|---|---|---|
int |
stride |
the number of bytes between 2 lines of image |
int |
stride_uv |
the number of bytes between 2 lines of UV planes (for planar YUV formats) |
int |
nb_lines |
the number of lines required (set to 0 if the element doesn’t require a specific number of lines) |
int |
alignment |
alignment requirement in bytes |
int |
max_image_size |
the number of bytes allocated |
bool |
cacheable |
if true, HW will require cache maintenance |
unsigned char ∗ |
addr |
the aligned buffer address |
unsigned char ∗ |
addr_u |
the aligned buffer address for chroma plane U (for planar YUV formats) |
unsigned char ∗ |
addr_v |
the aligned buffer address for chroma plane V (for planar YUV formats) |
unsigned char ∗ |
heap_p |
pointer to the heap that should be freed |
hal_img_decoder_setup_t#
struct hal_img_decoder_setup_t
Data Fields
type |
name |
description |
|---|---|---|
const char ∗ |
vdec_dev_name |
|
decoder_setup_func |
hal_graphics_setup_t#
struct hal_graphics_setup_t
Data Fields
type |
name |
description |
|---|---|---|
const char ∗ |
gfx_dev_name |
|
gfx_setup_func |
hal_display_setup_t#
struct hal_display_setup_t
Data Fields
type |
name |
description |
|---|---|---|
const char ∗ |
display_name |
|
display_setup_func |
hal_camera_setup_t#
struct hal_camera_setup_t
Data Fields
type |
name |
description |
|---|---|---|
const char ∗ |
camera_name |
|
camera_setup_func |
checksum_data_t#
struct checksum_data_t
computed checksum
Data Fields
type |
name |
description |
|---|---|---|
type |
checksum calculation method |
|
uint32_t |
value |
checksum value |
2.1.1.2 Macro Definition Documentation#
max_stream_requesters#
#define MAX_STREAM_REQUESTERS
target_camera0_width#
#define TARGET_CAMERA0_WIDTH
Buffer alignment requirement for camera device buffers in bytes.
core1_ept_address#
CORE1_EPT_ADDRESS
#define CORE1_EPT_ADDRESS
Endpoint address for Core 1 inter-core communication channel.
mpp_ept_addresss#
MPP_EPT_ADDRESSS
#define MPP_EPT_ADDRESSS
Endpoint address for MPP (Media Processing Pipeline) inter-core communication channel. MPP might use a range of endpoints starting with 40 and up to 49 included
rtsp_ept_address#
RTSP_EPT_ADDRESS
#define RTSP_EPT_ADDRESS
Endpoint address for RTSP (Real Time Streaming Protocol) inter-core communication channel.
app_ep_ready_event_data#
APP_EP_READY_EVENT_DATA
#define APP_EP_READY_EVENT_DATA
Event data value indicating that the application endpoint is ready for communication.
file_source_filepath_max_len#
FILE_SOURCE_FILEPATH_MAX_LEN
#define FILE_SOURCE_FILEPATH_MAX_LEN
hal_gfx_dev_cpu_name#
HAL_GFX_DEV_CPU_NAME
#define HAL_GFX_DEV_CPU_NAME
hal graphics (gfx) device declaration.
Graphics processing devices can be used to perform conversion from one image format to another, resize images and compose images on top of one another. Examples of graphics devices include the PXP (pixel pipeline) found on many i.MXRT series MCUs. Name of the graphic device using CPU operations
gui_printf_buf_size#
GUI_PRINTF_BUF_SIZE
#define GUI_PRINTF_BUF_SIZE
Local text buffer size.
hal_vdec_dev_name#
HAL_VDEC_DEV_NAME
#define HAL_VDEC_DEV_NAME
hal video decoder (vdec) device declaration.
Video decoder devices can be used to perform decompression of image. Examples of decoder devices include the PNG/JPEG HW or SW found on many i.MXRT series MCUs. Name of the jpeg decoder device using CPU operations
max_input_ports#
MAX_INPUT_PORTS
#define MAX_INPUT_PORTS
maximum number of element inputs/outputs
hal_device_name_max_length#
HAL_DEVICE_NAME_MAX_LENGTH
#define HAL_DEVICE_NAME_MAX_LENGTH
maximum length of device name
2.1.1.3 Typedef Documentation#
camera_dev_callback_t#
typedef int(∗ camera_dev_callback_t) (const camera_dev_t ∗dev, camera_event_t event, void ∗param, uint8_t fromISR)
Callback function to notify camera manager that one frame is dequeued.
Parameters
name |
description |
|---|---|
dev |
Device structure of the camera device calling this function |
event |
id of the event that took place |
param |
Parameters |
fromISR |
True if this operation takes place in an irq, 0 otherwise |
Returns
0 if the operation was successfully
mpp_callback_t#
typedef int(∗ mpp_callback_t) (mpp_t mpp, mpp_evt_t evt, void ∗evt_data, void ∗user_data) The mpp callback function prototype.
img_decoder_setup_func_t#
typedef int(∗ img_decoder_setup_func_t) (vdec_dev_t ∗) video decoder setup
graphic_setup_func_t#
typedef int(∗ graphic_setup_func_t) (gfx_dev_t ∗) graphics setup
display_setup_func_t#
typedef int(∗ display_setup_func_t) (display_dev_t ∗) display setup
camera_setup_func_t#
typedef int(∗ camera_setup_func_t) (const char ∗, camera_dev_t ∗) camera setup
2.1.1.4 Enumeration Type Documentation#
hal_camera_status_t#
enum hal_camera_status_t Camera return status.
Enumerator
camera_event_t#
enum camera_event_t
Type of events that are supported by calling the callback function.
Enumerator
label |
description |
|---|---|
Camera new frame is available. |
|
Camera device finished the initialization process. |
Enumeration Type Documentation
virtual_usb_cam_msg_type_e#
enum virtual_usb_cam_msg_type_e
Structure that characterizes the exchanged message types between core 0 and core 1.
virtual_usb_cam_col_format_e#
enum virtual_usb_cam_col_format_e
Structure that characterizes the color format for the camera output.
hal_image_status_t#
enum hal_image_status_t static image return status
Enumerator
hal_filesrc_status_t#
enum hal_filesrc_status_t
File source return status.
Enumerator
gfx_rotate_target_t#
enum gfx_rotate_target_t gfx rotate target
hal_vdec_status_t#
enum hal_vdec_status_t
video decoder return status
Enumerator
hal_valgo_status_t#
enum hal_valgo_status_t
Valgo Error codes for hal operations.
Enumerator
display_event_t#
enum display_event_t
Type of events that are supported by calling the callback function.
Enumerator
hal_display_status_t#
enum hal_display_status_t Error codes for display hal devices.
Enumerator
mpp_memory_policy_t#
enum mpp_memory_policy_t
The memory allocation policy of an element’s hal.
During the pipeline construction, the HAL uses this enum to tell the pipeline if it already owns input/ouput buffers. Before the pipeline starts, the memory manager will map the existing buffers to elements and allocate missing buffers from the heap.
Enumerator
label |
description |
|---|---|
element requires buffers to be provided by other elements, or by the pipeline |
|
element allocates its input buffer, it may require output buffers to be provided by other elements, or by the pipeline |
|
element allocates its output buffer, it may require input buffers to be provided by other elements, or by the pipeline |
|
element allocates both its input and output buffers |
checksum_type_t#
enum checksum_type_t checksum calculation method
Enumerator
2.1.1.5 Function Documentation#
search_h264_nalu()
int search_h264_nalu ( const uint8_t ∗ data, int32_t len )
Search function for H.264 NALU boundaries.
This function searches for H.264 Network Abstraction Layer Unit (NALU) start codes in the provided data buffer. It looks for:
4-byte start code: 0x00 0x00 0x00 0x01
3-byte start code: 0x00 0x00 0x01
Parameters
in/out |
name |
description |
|---|---|---|
in |
data |
Pointer to buffer containing H.264 bitstream data |
in |
len |
Length of data in buffer (bytes) |
Returns
Offset to next NALU start code, or -1 if not found
Note
This function is provided as a reference implementation. Users can provide custom slice search functions for other formats.
HAL_GfxDev_CPU_Register()
int HAL_GfxDev_CPU_Register ( gfx_dev_t ∗ dev )
Register the graphic device with the CPU operations.
Parameters
in/out |
name |
description |
|---|---|---|
in |
dev |
graphic device to register |
Returns
error code (0: success, otherwise: failure)
HAL_GfxDev_GPU_Register()
int HAL_GfxDev_GPU_Register ( gfx_dev_t ∗ dev )
Register the graphic device with the GPU operations.
Parameters
in/out |
name |
description |
|---|---|---|
in |
dev |
graphic device to register |
Returns
error code (0: success, otherwise: failure)
HAL_JPEG_CPU_Register()
int HAL_JPEG_CPU_Register ( vdec_dev_t ∗ dev )
Register the jpeg SW decoder device.
Parameters
in/out |
name |
description |
|---|---|---|
in |
dev |
decoder device to register |
Returns
error code (0: success, otherwise: failure)
HAL_JPEG_HW_Register()
int HAL_JPEG_HW_Register ( vdec_dev_t ∗ dev )
Register the jpeg HW decoder device.
Parameters
in/out |
name |
description |
|---|---|---|
in |
dev |
decoder device to register |
Returns
error code (0: success, otherwise: failure)
HAL_VdecDev_H264_CPU_Register()
hal_vdec_status_t HAL_VdecDev_H264_CPU_Register ( vdec_h264_dev_t ∗ dev )
Register the H.264 SW decoder device.
Parameters
in/out |
name |
description |
|---|---|---|
in |
dev |
decoder device to register |
Returns
error code (0: success, otherwise: failure)
2.2 HAL OPERATIONS#
Data Structures
struct camera_dev_operator_t
struct static_image_operator_t
struct filesrc_operator_t
struct gfx_dev_operator_t
struct vdec_dev_operator_t
struct vdec_h264_dev_operator_t
struct vision_algo_dev_operator_t
struct display_dev_operator_t
Typedefs
typedef int(∗mpp_callback_t) (mpp_t mpp, mpp_evt_t evt, void ∗evt_data, void ∗user_data)
Functions
void GUI_DrawText (uint16_t ∗lcd_buf, uint16_t fcolor, uint16_t bcolor, uint32_t width, int x, int y, const char ∗label)
static void hal_draw_pixel565 (uint16_t ∗pDst, uint32_t x, uint32_t y, uint16_t color, uint32_t lcd_w)
static void hal_draw_text565 (uint16_t ∗lcd_buf, uint16_t fcolor, uint16_t bcolor, uint32_t width, int x, int y, const char ∗label, int stripe_top, int stripe_bottom)
static void hal_draw_rect565 (uint16_t ∗lcd_buf, hal_rect_t rect, mpp_color_t rgb, uint32_t width, int stripe← _top, int stripe_bottom)
static int get_bitpp (mpp_pixel_format_t type)
void swap_2_bytes (uint8_t ∗data, int size)
2.2.1 Detailed Description#
This section provides the detailed documentation for the MPP HAL operations that needs to be implemented for each component.
2.2.1.1 Data Structure Documentation#
camera_dev_operator_t#
struct camera_dev_operator_t
Operation that needs to be implemented by a camera device.
Data Fields
hal_camera_status_t(∗init )(camera_dev_t ∗dev, mpp_camera_params_t ∗config, camera_dev_callback_t callback, void ∗param)
hal_camera_status_t(∗deinit )(camera_dev_t ∗dev)
hal_camera_status_t(∗start )(const camera_dev_t ∗dev)
hal_camera_status_t(∗stop )(const camera_dev_t ∗dev)
hal_camera_status_t(∗enqueue )(const camera_dev_t ∗dev, void ∗data)
hal_camera_status_t(∗dequeue )(const camera_dev_t ∗dev, void ∗∗data, int ∗stripe, int ∗compressed_size)
hal_camera_status_t(∗get_buf_desc )(const camera_dev_t ∗dev, hw_buf_desc_t ∗out_buf, mpp_memory_policy_t ∗policy)
hal_camera_status_t(∗lock )(const camera_dev_t ∗dev)
hal_camera_status_t(∗unlock )(const camera_dev_t ∗dev)
Field Documentation
init#
init
hal_camera_status_t(∗ camera_dev_operator_t::init) (camera_dev_t ∗dev, mpp_camera_params_t ∗config, camera_dev_callback_t callback, void ∗param)
initialize the dev
deinit#
deinit
hal_camera_status_t(∗ camera_dev_operator_t::deinit) (camera_dev_t ∗dev)
deinitialize the dev
start#
start
hal_camera_status_t(∗ camera_dev_operator_t::start) (const camera_dev_t ∗dev)
start the dev
stop#
stop
hal_camera_status_t(∗ camera_dev_operator_t::stop) (const camera_dev_t ∗dev)
stop the dev
enqueue#
enqueue
hal_camera_status_t(∗ camera_dev_operator_t::enqueue) (const camera_dev_t ∗dev, void ∗data) enqueue a buffer to the dev
dequeue#
dequeue
hal_camera_status_t(∗ camera_dev_operator_t::dequeue) (const camera_dev_t ∗dev, void ∗∗data, int ∗stripe)
dequeue a buffer from the dev (blocking)
get_buf_desc#
get_buf_desc
hal_camera_status_t(∗ camera_dev_operator_t::get_buf_desc) (const camera_dev_t ∗dev, hw_buf_desc_t ∗out_buf, mpp_memory_policy_t ∗policy)
get buffer descriptors and policy
lock#
lock
hal_camera_status_t(∗ camera_dev_operator_t::lock) (const camera_dev_t ∗dev)
lock the device for exclusive access and operations
unlock#
hal_camera_status_t(∗ camera_dev_operator_t::unlock) (const camera_dev_← t ∗dev)
unlock the device after exclusive operations
static_image_operator_t#
struct static_image_operator_t
Operation that needs to be implemented by an image element.
Data Fields
hal_image_status_t(∗init )(static_image_t ∗elt, mpp_img_params_t ∗config, void ∗param)
hal_image_status_t(∗dequeue )(static_image_t ∗elt, hw_buf_desc_t ∗out_buf, int ∗stripe_num)
init#
init
hal_image_status_t(∗ static_image_operator_t::init) (static_image_t ∗elt, mpp← _img_params_t ∗config, void ∗param)
initialize the elt
dequeue#
dequeue
hal_image_status_t(∗ static_image_operator_t::dequeue) (static_image_← t ∗elt, hw_buf_desc_t ∗out_buf, int ∗stripe_num)
dequeue a buffer from the elt
filesrc_operator_t#
struct filesrc_operator_t
Operation that needs to be implemented by a file source element.
Data Fields
hal_filesrc_status_t(∗init )(filesrc_t ∗dev, mpp_filesrc_params_t ∗config, void ∗param)
hal_filesrc_status_t(∗deinit )(filesrc_t ∗dev)
hal_filesrc_status_t(∗start )(const filesrc_t ∗dev)
hal_filesrc_status_t(∗stop )(const filesrc_t ∗dev)
hal_filesrc_status_t(∗dequeue )(const filesrc_t ∗dev, void ∗∗data, uint32_t ∗size)
hal_filesrc_status_t(∗get_buf_desc )(const filesrc_t ∗dev, hw_buf_desc_t ∗out_buf, mpp_memory_policy_t ∗policy)
Field Documentation
init#
init
hal_filesrc_status_t(∗ filesrc_operator_t::init) (filesrc_t ∗dev, mpp_filesrc_params_t ∗config, void ∗param)
initialize the dev
deinit#
deinit
hal_filesrc_status_t(∗ filesrc_operator_t::deinit) (filesrc_t ∗dev)
deinitialize the dev
start#
start
hal_filesrc_status_t(∗ filesrc_operator_t::start) (const filesrc_t ∗dev)
start the dev
stop#
stop
hal_filesrc_status_t(∗ filesrc_operator_t::stop) (const filesrc_t ∗dev)
stop the dev
dequeue#
dequeue
hal_filesrc_status_t(∗ filesrc_operator_t::dequeue) (const filesrc_t ∗dev, void ∗∗data, uint32_t ∗size)
dequeue a buffer
get_buf_desc#
get_buf_desc
hal_filesrc_status_t(∗ filesrc_operator_t::get_buf_desc) (const filesrc_t ∗dev, hw_buf_desc_t ∗out_buf, mpp_memory_policy_t ∗policy)
get buffer descriptors and policy
gfx_dev_operator_t#
struct gfx_dev_operator_t
Operation that needs to be implemented by gfx device.
Data Fields
int(∗init )(gfx_dev_t ∗dev, void ∗param)
int(∗deinit )(gfx_dev_t ∗dev)
int(∗get_buf_desc )(const gfx_dev_t ∗dev, hw_buf_desc_t ∗in_buf, hw_buf_desc_t ∗out_buf, mpp_memory_policy_t ∗policy)
int(∗blit )(const gfx_dev_t ∗dev, const gfx_surface_t ∗pSrc, const gfx_surface_t ∗pDst, const gfx_rotate_config_t ∗pRotate, mpp_flip_mode_t flip)
int(∗drawRect )(const gfx_dev_t ∗dev, gfx_surface_t ∗pOverlay, int x, int y, int w, int h, int color)
int(∗drawPicture )(const gfx_dev_t ∗dev, gfx_surface_t ∗pOverlay, int x, int y, int w, int h, int alpha, const char ∗pIcon)
int(∗drawText )(const gfx_dev_t ∗dev, gfx_surface_t ∗pOverlay, int x, int y, int textColor, int bgColor, int type, const char ∗pText)
int(∗compose )(const gfx_dev_t ∗dev, gfx_surface_t ∗pSrc, gfx_surface_t ∗pOverlay, gfx_surface_t ∗pDst, gfx_rotate_config_t ∗pRotate, mpp_flip_mode_t flip)
int(∗finish )(gfx_dev_t ∗dev)
vdec_dev_operator_t#
struct vdec_dev_operator_t
Operation that needs to be implemented by vdec device.
Data Fields
int(∗init )(vdec_dev_t ∗dev, void ∗param)
int(∗deinit )(const vdec_dev_t ∗dev)
int(∗ get_buf_desc )(const vdec_dev_t ∗dev, hw_buf_desc_t ∗in_buf, hw_buf_desc_t ∗out_buf, mpp_memory_policy_t ∗policy)
int(∗decode )(const vdec_dev_t ∗dev, uint8_t ∗pSrc, uint8_t ∗pDst, int32_t jpg_size, uint32_t row_stride)
vdec_h264_dev_operator_t#
struct vdec_h264_dev_operator_t
Data Fields
hal_vdec_status_t(∗init )(vdec_h264_dev_t ∗dev, void ∗param)
hal_vdec_status_t(∗deinit )(const vdec_h264_dev_t ∗dev)
hal_vdec_status_t(∗get_buf_desc )(const vdec_h264_dev_t ∗dev, hw_buf_desc_t ∗in_buf, hw_buf_desc_t ∗out_buf, mpp_memory_policy_t ∗policy)
hal_vdec_status_t(∗decode )(const vdec_h264_dev_t ∗dev, vdec_h264_frame_info_t ∗frame_info)
vision_algo_dev_operator_t#
struct vision_algo_dev_operator_t
Operation that needs to be implemented by a vision algorithm device.
Data Fields
hal_valgo_status_t(∗init )(vision_algo_dev_t ∗dev, model_param_t ∗param)
hal_valgo_status_t(∗deinit )(vision_algo_dev_t ∗dev)
hal_valgo_status_t(∗run )(const vision_algo_dev_t ∗dev, void ∗data)
hal_valgo_status_t(∗get_buf_desc )(const vision_algo_dev_t ∗dev, hw_buf_desc_t ∗in_buf, mpp_memory_policy_t ∗policy)
init#
init
hal_valgo_status_t(∗ vision_algo_dev_operator_t::init) (vision_algo_dev_t ∗dev, model_param_t ∗param)
initialize the dev
deinit#
deinit
hal_valgo_status_t(∗ vision_algo_dev_operator_t::deinit) (vision_algo_dev_t ∗dev)
deinitialize the dev
run#
run
hal_valgo_status_t(∗ vision_algo_dev_operator_t::run) (const vision_algo_dev_t ∗dev, void ∗data)
get_buf_desc#
get_buf_desc
hal_valgo_status_t(∗ vision_algo_dev_operator_t::get_buf_desc) (const vision_algo_dev_t ∗dev, hw_buf_desc_t ∗in_buf, mpp_memory_policy_t ∗policy)
read input parameters
display_dev_operator_t#
struct display_dev_operator_t
Operation that needs to be implemented by a display device.
Data Fields
hal_display_status_t(∗init)(display_dev_t ∗dev, mpp_display_params_t ∗config, mpp_callback_t callback, void ∗user_data)
hal_display_status_t(∗deinit )(const display_dev_t ∗dev)
hal_display_status_t(∗start )(display_dev_t ∗dev)
hal_display_status_t(∗stop )(display_dev_t ∗dev)
hal_display_status_t(∗blit )(const display_dev_t ∗dev, void ∗frame, int stripe)
hal_display_status_t(∗get_buf_desc )(const display_dev_t ∗dev, hw_buf_desc_t ∗in_buf, mpp_memory_policy_t ∗policy)
Field Documentation
init
hal_display_status_t(∗ display_dev_operator_t::init) (display_dev_t ∗dev, mpp← _display_params_t ∗config, mpp_callback_t callback, void ∗user_data)
initialize the dev
deinit
hal_display_status_t(∗ display_dev_operator_t::deinit) (const display_dev_t ∗dev)
deinitialize the dev
start
hal_display_status_t(∗ display_dev_operator_t::start) (display_dev_t ∗dev) start the dev
stop
hal_display_status_t(∗ display_dev_operator_t::stop) (display_dev_t ∗dev) stop the dev
blit
hal_display_status_t(∗ display_dev_operator_t::blit) (const display_dev_t ∗dev, void ∗frame, int stripe)
blit a buffer to the dev
get_buf_desc
hal_display_status_t(∗ display_dev_operator_t::get_buf_desc) (const display_dev_t ∗dev, hw_buf_desc_t ∗in_buf, mpp_memory_policy_t ∗policy)
get buffer descriptors and policy
2.2.1.2 Typedef Documentation#
mpp_callback_t
typedef int(∗ mpp_callback_t) (mpp_t mpp, mpp_evt_t evt, void ∗evt_data, void ∗user_data)
The mpp callback function prototype.
2.2.1.3 Function Documentation#
GUI_DrawText#
void GUI_DrawText ( uint16_t ∗ lcd_buf, uint16_t fcolor, uint16_t bcolor, uint32_t width, int x, int y, const char ∗ label )
Draws text stored in label pointer to LCD buffer. This function copy content of data from label text buffer to the LCD.
Parameters
name |
description |
|---|---|
lcd_buf |
LCD buffer address destination for drawing text |
fcolor |
foreground color in rgb565 format |
bcolor |
background color in rgb565 format |
width |
LCD width |
x |
drawing position on X axe |
y |
drawing position on Y axe |
label |
C string pointed by label |
Returns
hal_draw_pixel565#
static void hal_draw_pixel565 ( uint16_t ∗ pDst, uint32_t x, uint32_t y, uint16_t color, uint32_t lcd_w )
Draws pixel with RGB565 color to defined point.
Parameters
name |
description |
|---|---|
pDst |
image data address of destination buffer |
x |
drawing position on X axe |
y |
drawing position on Y axe |
color |
RGB565 encoded value |
lcd_w |
lcd width |
hal_draw_text565#
static void hal_draw_text565 ( uint16_t ∗ lcd_buf, uint16_t fcolor, uint16_t bcolor, uint32_t width, int x, int y, const char ∗ label, int stripe_top, int stripe_bottom ) [static]
Draws text stored in label pointer to LCD buffer. This function copy content of data from label text buffer to the LCD.
Parameters
name |
description |
|---|---|
lcd_buf |
LCD buffer address destination for drawing text |
fcolor |
foreground color in rgb565 format |
bcolor |
background color in rgb565 format |
width |
LCD width |
x |
drawing position on X axe |
y |
drawing position on Y axe |
format |
C string pointed by format |
Returns
The return number of written chars to the buffer
hal_draw_rect565#
static void hal_draw_rect565 ( uint16_t ∗ lcd_buf, hal_rect_t rect, mpp_color_t rgb, uint32_t width, int stripe_top, int stripe_bottom ) [static]
Draws rectangle.
Parameters
in/out |
name |
description |
|---|---|---|
in |
lcd_buf |
LCD buffer address destination for drawing rectangle |
in |
color |
background color in rgb565 format |
in |
x |
drawing position on X axe |
in |
y |
drawing position on Y axe |
in |
xsize |
rectangle width |
in |
ysize |
rectangle height |
in |
r |
0-255 red color value |
in |
g |
0-255 green color value |
in |
b |
0-255 blue color value |
in |
width |
LCD width |
Returns
N/A
get_bitpp#
**get_bitpp()**static int get_bitpp ( mpp_pixel_format_t type ) [static]
returns the number of bits per pixel per format, unknown format return 0
swap_2_bytes#
**swap_2_bytes()**void swap_2_bytes ( uint8_t ∗ data, int size )
Swaps a buffer’s MSB and LSB bytes..
Parameters
name |
description |
|---|---|
data |
pointer to the buffer to be converted(from little endian to big endian and vice-versa). |
size |
buffer size. |
2.3 HAL Setup Functions#
Functions
int hal_label_rectangle (uint8_t ∗frame, int width, int height, mpp_pixel_format_t format, mpp_labeled_rect_t ∗lr, int stripe, int stripe_max)
int hal_landmark (uint8_t ∗frame, int width, int height, mpp_pixel_format_t format, mpp_landmark_t ∗lk, int stripe, int stripe_max)
int hal_inference_tflite_setup (vision_algo_dev_t ∗dev)
int hal_inference_executorch_setup (vision_algo_dev_t ∗dev)
int hal_display_setup (const char ∗name, display_dev_t ∗dev)
int hal_camera_setup (const char ∗name, camera_dev_t ∗dev)
int hal_gfx_setup (const char ∗name, gfx_dev_t ∗dev)
int hal_img_decoder_setup (const char ∗name, vdec_dev_t ∗dev)
int hal_mc_dev_setup (const char ∗name, multicore_dev_t ∗dev)
2.3.1 Detailed Description#
This section provides the detailed documentation for the HAL setup functions that should be defined by each device.
2.3.1.1 Function Documentation#
hal_label_rectangle#
hal_label_rectangle()
int hal_label_rectangle ( uint8_t ∗ frame, int width, int height, mpp_pixel_format_t format, mpp_labeled_rect_t ∗ lr, int stripe, int stripe_max )
Implementation of hal labeled rectangle component that draws a rectangle and a text on an input image.
Parameters
in/out |
name |
description |
|---|---|---|
in |
frame |
The buffer address |
in |
width |
Image width |
in |
height |
Image height |
in |
format |
Image format |
in |
lr |
Labeled rectangle parameters |
in |
stripe |
stripe number (0=no stripe) |
in |
stripe_max |
max nb of stripes |
Returns
0
hal_landmark#
hal_landmark()
int hal_landmark ( uint8_t ∗ frame, int width, int height, mpp_pixel_format_t format, mpp_landmark_t ∗ lk, int stripe, int stripe_max )
Implementation of hal landmark component that draws a landmark on an input image.
Parameters
in/out |
name |
description |
|---|---|---|
in |
frame |
The buffer address |
in |
width |
Image width |
in |
height |
Image height |
in |
format |
Image format |
in |
lk |
landmark parameters |
in |
stripe |
stripe number (0=no stripe) |
in |
stripe_max |
max nb of stripes |
Returns
0
hal_inference_tflite_setup#
hal_inference_tflite_setup()
int hal_inference_tflite_setup ( vision_algo_dev_t ∗ dev )
Hal setup function for inference engine Tensorflow-Lite Micro.
Parameters
in/out |
name |
description |
|---|---|---|
in |
dev |
vision algo device to register |
Returns
error code (0: success, otherwise: failure)
hal_inference_executorch_setup#
hal_inference_executorch_setup()
int hal_inference_executorch_setup ( vision_algo_dev_t ∗ dev )
Hal setup function for inference engine ExecuTorch.
Parameters
in/out |
name |
description |
|---|---|---|
in |
dev |
vision algo device to register |
Returns
error code (0: success, otherwise: failure)
hal_display_setup#
hal_display_setup()
int hal_display_setup ( const char ∗ name, display_dev_t ∗ dev )
Register with a display device specified by name. If name is NULL, return error.
Parameters
in/out |
name |
description |
|---|---|---|
in |
name |
display name |
in |
dev |
display device to register |
Returns
error code (0: success, otherwise: failure)
hal_camera_setup#
hal_camera_setup()
int hal_camera_setup ( const char ∗ name, camera_dev_t ∗ dev )
Register with a camera device specified by name. If name is NULL, return error.
Parameters
in/out |
name |
description |
|---|---|---|
in |
name |
camera name |
in |
dev |
camera device to register |
Returns
error code (0: success, otherwise: failure)
hal_gfx_setup#
hal_gfx_setup()
int hal_gfx_setup ( const char ∗ name, gfx_dev_t ∗ dev )
Register with a graphic processing device specified by name.
If name is NULL, the first available graphic processing supported by Hw will be selected. The graphic device using CPU operations will be selected if name is not specified and if no graphic processing is available for the Hw.
Parameters
in/out |
name |
description |
|---|---|---|
in |
name |
graphic processing device performing the image conversion |
in |
dev |
graphic device to register |
Returns
error code (0: success, otherwise: failure)
hal_img_decoder_setup#
hal_img_decoder_setup()
int hal_img_decoder_setup ( const char ∗ name, vdec_dev_t ∗ dev )
Register with an image decoder device specified by name.
If name is NULL, the first available decoder supported by Hw will be selected. The decoder device using CPU operations will be selected if name is not specified and if no decoder is available for the Hw.
Parameters
in/out |
name |
description |
|---|---|---|
in |
name |
image decoding device name |
in |
dev |
decoder device to register |
Returns
error code (0: success, otherwise: failure)
hal_mc_dev_setup#
hal_mc_dev_setup()
int hal_mc_dev_setup ( const char ∗ name, multicore_dev_t ∗ dev )
Register multicore device.
Parameters
in/out |
name |
description |
|---|---|---|
in |
name |
multicore device name |
in |
dev |
multicore device to register |
Returns
error code (0: success, otherwise: failure)